Lyssna på storyn
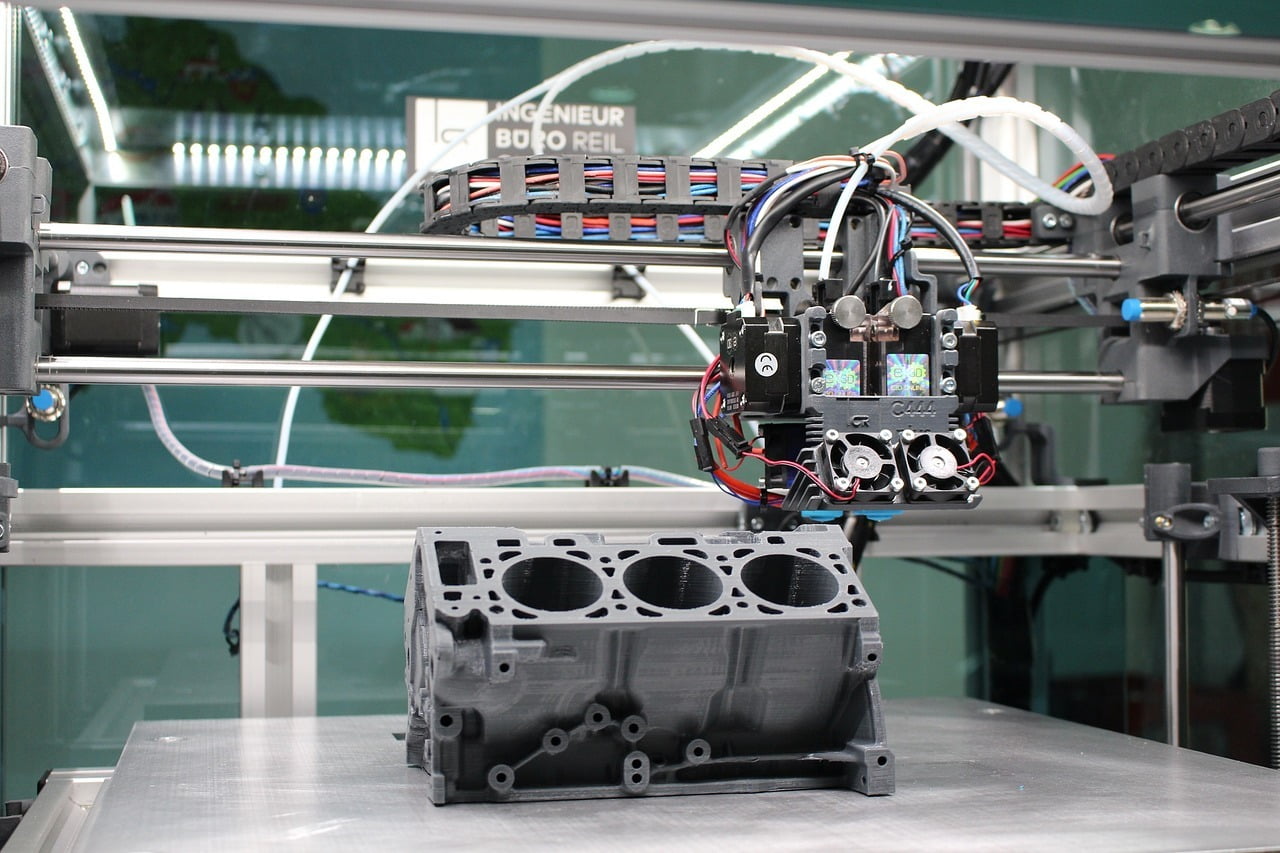
Från intelligenta lyfthjälpenheter som är gjorda för att lyfta vikt på ett säkert sätt men som inte har någon egen rörelsekraft till de första cobotarna med kamerasystem för att undvika hinder, ger området för kollaborativ robotik smarta fabriker nya sätt att använda automation. Den här artikeln kommer att ge en kort översikt över historien om kollaborativa robotar och se framåt mot några av de mest spännande utvecklingarna inom området. 1999 lämnade USA in ett patent på “en apparat och metod för direkt fysisk integration mellan en person och en manipulator för allmänt bruk som kontrolleras av en dator.” Detta är den första definitionen av “cobot”. Den nya enheten kunde flytta runt utanför en bur för att hjälpa människor med monteringsuppgifter, men av säkerhetsskäl hade den ingen egen strömkälla för rörelse. 2004 släppte ett Tyskt företag en lätt cobot som kan röra sig på egen hand. Detta var resultatet av ett långt samarbete mellan företaget i fråga och Tysklands Rymdcenter. Dess rörelsekontrollfunktioner förbättrades senare i två uppdaterade versioner som släpptes 2008 och 2013. Cobots möttes först av mycket skepsis inom tillverkningsindustrin, precis som all annan ny teknik. Många fabrikschefer tyckte att de var fantastiska tekniker, men de undrade om de kunde användas i en riktig arbetsmiljö. Idag växer dock marknaden för industriella cobots explosionsartat år efter år. Allt fler företag inser fördelarna med att låta cobots hantera monotona uppgifter eller högvolymsuppgifter. Cobots blir snabbt bättre, men det finns fortfarande problem som hindrar dem från att användas i de flesta tillverkningsanläggningar. Viktigast är behovet av finmotorik, som när man plockar upp små, ömtåliga bitar, och förmågan att fatta snabba beslut för att undvika problem utan att stoppa produktionen. För att hantera dessa problem tillverkar ledare i branschen cobots med snabbare processorer och inbyggda kamerasystem. Så, rumslig data kan bearbetas tillräckligt snabbt för att kontrollera rörelse på ett sätt som inte är möjligt med traditionella lösningar som använder vanlig hårdvara. På grund av denna nya robotteknik kan cobots göra mycket mer arbete. Traditionella lösningar stannar när de hittar ett hinder, som en operatörs arm, av säkerhetsskäl. Nya cobots, å andra sidan, jobbar runt hindret för att hitta den bästa rutten utan att stanna. Till exempel har nya cobots inbyggda kamerasystem som låter dem anpassa sig till förändringar i sin miljö. Detta inkluderar olika typer av hinder och förändringar i var föremålet de ska plocka upp är och var det behöver lämnas. Denna nya teknik eliminerar inte bara behovet av exakt positionering, utan den låter också tillverkarna äntligen kombinera säkerhet med maximal produktivitet. Faktum är att de nya cobotarna inte bara slutar. Istället kommer de att leta efter ett säkert sätt att fortsätta arbeta. Eftersom de nu kan känna av hinder bättre kan flera cobots arbeta tillsammans med olika uppgifter utan att någonsin stöta på varandra. Behovet av säkerhet och förmågan att arbeta i full fart tillgodoses båda av den nya generationen cobots. 
En del av det förflutna
Trender och förväntade händelser

Öppnar i ny tab